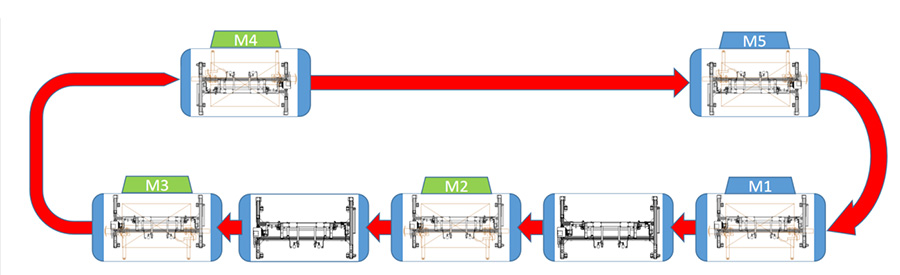
- M1:Raw materials Unloading point;
- M2:Finished Material Unloading Point;
- M2/3/4:Ground Charging Station; 5 different stations of M are under processing ;
Process:
- AGV carry the trolley to M1,the worker in M1 will spend about 160 secs, then AGV releasing ;
- AGV carries the trolley under processing in M2/M3/M4;
- When AGV reaches M5,the worker still working about 160 secs,after that drop the finished materials on the trolley ,AGV will Release then back to M1, Continue next Cycle.
The production line is a circulating production line: M1-M2–M5-M1; the function of the AGV is to pull the trolley through each processing station in order to realize the flow processing of the materials. After one cycle, the finished products are removed and the raw materials are placed. Continue to next processing. (The overall process is similar to the motor instrument line)
Overall Processing
1,AGV moves to M1 with trolley loading Raw-Materials
When starts working, AGV carries empty Trolley toM1,the positioning system will fix the trolley,the worker in M1 will processing the raw material, after 160secs, AGV release;
2,AGV carry the trolley with materials to M2/M3/M4
When M1 closed working,the positioning system will release the Pin then send a release signal,AGV carries the trolley to Next station;
3,The AGV automatically charge while pulling the material for processing
AGV carries the trolley in M2/3/4 processing at least 160 secs, During this period the AGV will in Charge;
4,AGV carries the trolley to production Line
The AGV pulls the material to M5. The worker will process the material. After the worker finished, the finished product is removed and the AGV will be released. The AGV goes to M1 to continue the Next processing.
Wireless Communication System
Target:Communication between AGV and positioning system through a wireless communication system.
How to install:
A mainboard will be installed in the AGV body. The PLC of the positioning system needs to reserve I/O ports to install the slave board.;
Principls:
The PLCs of both parties cannot directly connect, so a signal transmission medium is needed in the middle. The wireless communication system plays the role of the transmission medium. The positioning system sends a release signal, which is first received from the slave board, and after receiving the signal from the slave board, it is converted and sent to the AGV mainboard. Finally, the mainboard then sends the signal to the PLC of the AGV to achieve the signal interaction;
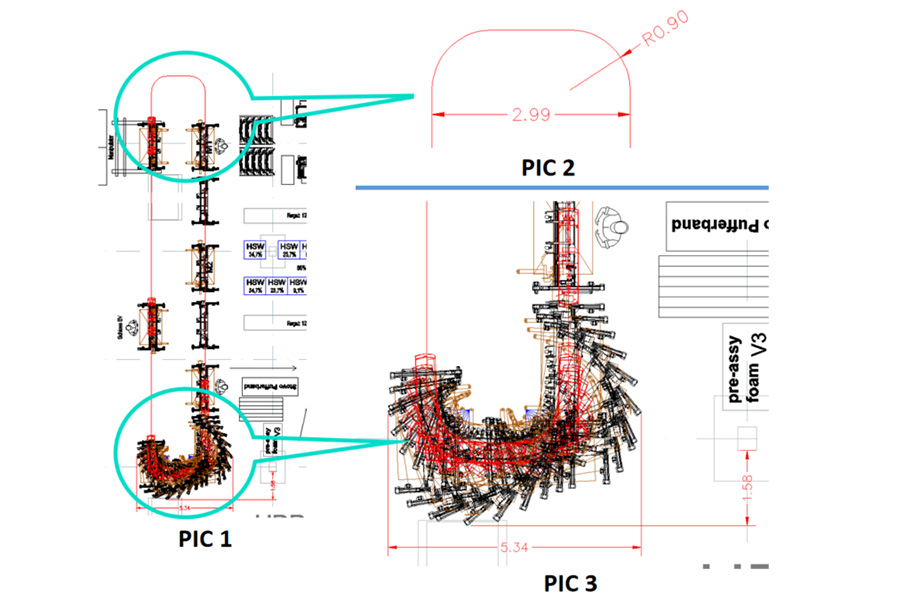
the overall layout and partial enlargement of the site:
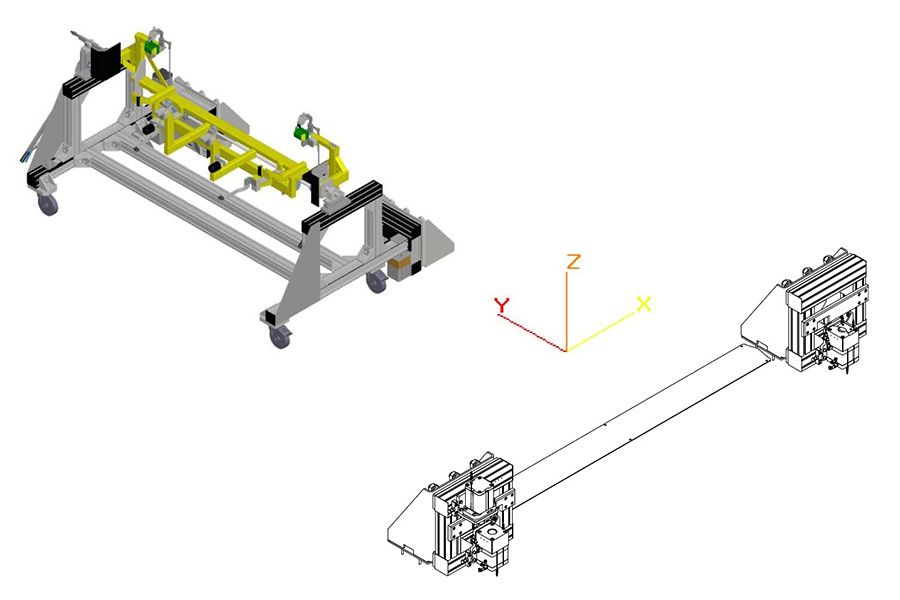
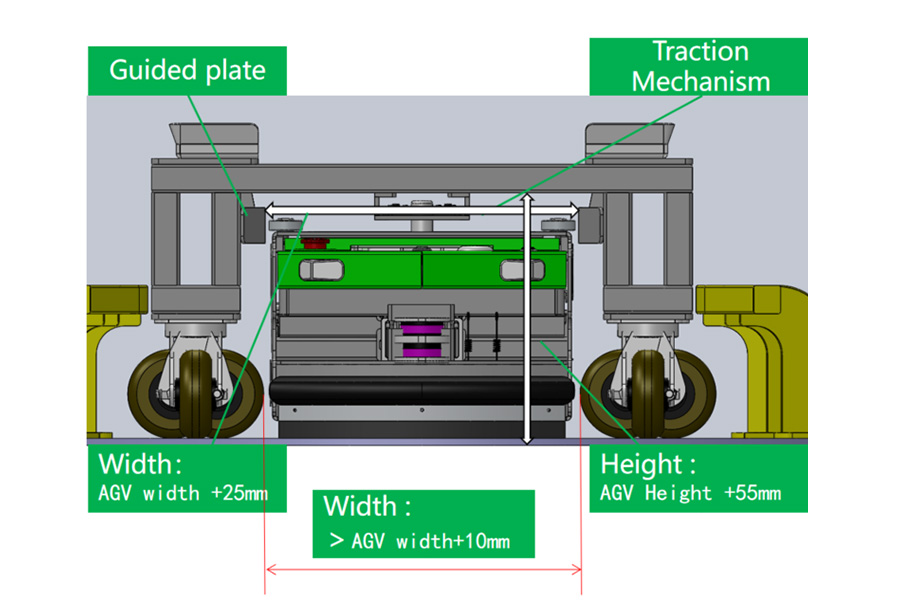
The Trolley Design Principle:
- Trolley’s underpants from the Ground:AGV height +55mm ,Width:AGV Width +25mm,
- According to the matching effect between the AGV and the trolley, the casters can all be universal wheels; two directional wheels and two universal wheels can also be used,
- The trolley underpin add traction & hanging mechanism and the guide plate,
Guide Plate: Ensure that the skip does not shake during AGV driving.
| AGV Type | Ultra low Bidirectional lurking and pulling AGV 168mm height |
|---|---|
| External Dimension | L2100*W420*H168(mm) |
| Minimum turning radius | 900mm |
| Travel Direction | Forward, backword, turn left and right |
| Driving Lifting Type | Automatic lifting |
| Control Method | PLC/AGV Moving Control Unit (Optional) |
| Guidance Method | Magnetic Tape Guidance |
| Communication Function | RF / WiFi |
| Driving Method | Differential Speed Driving |
| Driving Power Supply | DC 24V |
| Loading Capacity | 500KG |
| Moving Speed | 0-45m/min (custom support) |
| Guidance Accuracy | ±10mm |
| Stop Accuracy | ±10mm |
| Working Type | 24 Hours |
| Gradeability | 2-3 degree |
| Charging Type | Manual Charging (optional automatic charging) |
| Battery | Lead acid battery / lithium battery, Maintenance Free Battery, Continuous discharge number>300 times |
| Safety Induction Range | ≤3m, Adjustable. The distance for emergency brake is less than 20mm |
| Human-machine Interface | The touch screen human-machine interface is adopted to easily set the parameter, site or alarm. |
| Working Environment | Indoor Temperature: 0-40 Celsius Degree; Relative Humidity: 5%-90% |
| Safety Protection | Front Obstacle Testing Sensor + Mechanical Anti-collision Mechanism |
| Safety induction range | Detecting range ≤3m, adjustable; Emergency braking distance: <20mm |
| Alarm | Sound and Lighting alarm |
| Design Life | >10 Years |
| Basic Introduction of this Magnetic Strip Guided Automatic Guided Vehicle |
|---|
| AGV adopts special driving mechanism and special control system with mature technology and stable performance, fully realizes the universality and modularization of system control, and the performance of each functional module is stable. Motors, navigation sensors, landmark sensors and other core components all use high-quality famous brand components such as SICK, SIMENS to ensure stable and reliable operation. |
| Drive Unit: differential driving method, DC brushless motor. The driving mechanism has a shock absorption mechanism to ensure that the AGV can run on uneven ground, so as to achieve the shock absorption effect of the vehicle and reduce mechanical damage. |
| Control Unit: The control part adopts high-performance embedded system as the central control hub, supplemented by RFID technology, high-efficiency brake circuit and magnetic induction tracking technology. It constitutes a complete sampling-processing-issuing instructions-executing instructions, such a closed-loop control system. |
| Controller and Operation Panel: with perfect manual/automatic conversion function, it can operate independently of the transport line in manual state; AGV is not affected during emergency stop or normal line stop, and the AGV can work independently outside the transport line in manual state Operation; AGV has running sound and light prompts, alarm sound and light prompts, AGV working status and fault information, etc. You can set system parameters and modify system parameters through the display and operation panel. |
| An obstacle sensor and a buffer protector are installed at the front end of the AGV: the obstacle sensor can detect obstacles within the range of 0-180° in the direction of the AGV cart (distance 0–3M adjustable). When the obstacle is detected, the AGV It will slow down and then stop (distance adjustable), and an alarm will prompt you to remove the obstacle. When the obstacle is removed, the AGV car will start automatically. When the obstacle touches the anti-collision mechanism, the AGV automatically stops immediately and sound and light alarm will start. The operator must manually start the AGV after clearing the obstacle, and the AGV can continue to work. |
| Buffer Protector: a mechanical protection device that contains a trigger sensor switch. When the AGV is in direct contact with an obstacle, the mechanical protection device and the electronic switch are triggered to automatically cut off the power. After the AGV stops, it must be manually restored before the button can be restarted to protect pedestrian safety. |
| The AGV is equipped with eye-catching signal lights and audible alarm devices to remind surrounding operators. |
| Emergency Stop Switch: The AGV is equipped with an emergency stop switch; after the emergency stop switch is pressed, the power of each drive motor is disconnected and the motor is locked, then manual intervention is required to start; the processing method is simple and fast, and the processing time is within 3 seconds. |
Solution list of this Project:
| No. | Model | Quanlity | Unit | Remark |
|---|---|---|---|---|
| 1 | Bidirectional Lurking and Pulling AGV | 9 | Set | Load Capacity: 500KG, L2100xW420xH168(mm) |
| 2 | Lithium Battery | 9 | Set | 24V 30AH |
| 3 | Charging Station | 3 | Set | Automatic Charing from Ground |
| 4 | Manual Charger | 2 | Pcs | 24V 25A |
| 5 | Card Writer | 1 | Pcs | Writing RFID card(Easy for customer's maintance) |
| 6 | RFID Card | 50 | Pcs | Spare used card included |
| 7 | Magnetic Tape | 100 | Meter | 50*1.2 |
| 8 | Tape Protection | 100 | Meter | Width 80mm,to protect the tape |
| 9 | AGV Intelligent System | 1 | Set | Traffic control + AGV real statue shown |
| 10 | Dispatching System | 1 | Set | Dispatching AGV to excute the task |
| 11 | Wireless Communication System | 5 | Set | It's used for signal interaction between the AGV and positioning mechanism |
| 12 | Trolley Traction & Hanging Mechanism | 9 | Set | 1 Trolley Instal 1 set |
| 13 | AGV Solution Design | 1 | Pcs | |
| 14 | Installation and Commissioning | 1 | Pcs | |
| 15 | Accompanying Factory Production | 1 | Pcs | |
| 16 | Packaging, Transportation, Insurance, Training,Acceptance | 1 | Pcs |
Training and Services:
| Training Plan | We provide AGV operating training to help our customers, and to solve basic problems while the AGV is operating and increase the efficiency. Two plans: 1, Customers assign staff to our company to get trained once we finish the manufacturing and testing in our factory, then they are qualified to get back to working site to give instructions. 2, Our company could send our staff to our customers' project site with your permission to help. |
| Pre-Sales Service | Free consulting service Customize non-standard product Free technical consulting for specific requirement and particular construction scheme |
| Mid-Sales Service | We will recommend the most suitable product based on your requirements |
| After-sales Service | Free technical operating training Free instruction on installation and debugging Satisfying solution within 12 - 24 hours since your request is received |
| Maintenance Service | Support. An agreement will be signed. |